| 항목 | 요구사양 |
|---|---|
| 방전 전압 범위 | 39.2V ~ 58.8V |
| 최대 방전 규격 | 20A |
| 충전 전압 | 58V |
| 최대 충전 전류 | 20A (1모듈) / 50A (3모듈) |
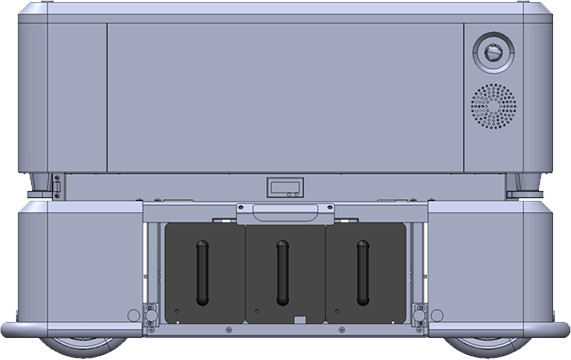
| 모듈 팩 병렬 적용 | 3병렬 |
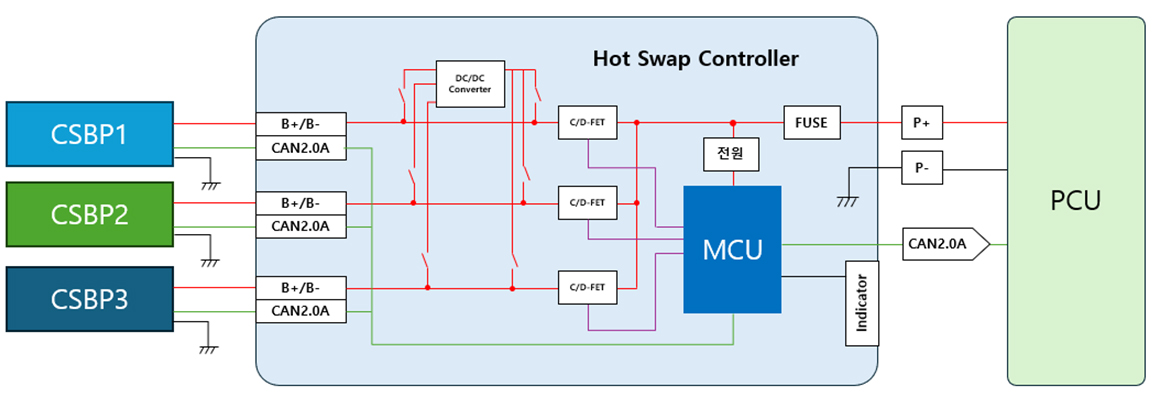
| 출력 제어 | MOSFET |
| 돌입 전류 제한 | Pre-charge 회로 또는 DC/DC 컨버터 |
| Swapping 상태표시 | LED 상태 표시 (1~3번 모듈/전원/Fault) |
| 모니터링 S/W | 모바일용 블루투스 모니터링 및 데이터 로깅 |
| 케이스 | St/분체 도장 (검정색) |
| 적용 가능 사이즈 | 425 x 178 x 170mm 이내 |
| 통신 Port | U-CAN |
| 입출력/출력 커넥터 | 터미널 블록 With Cover (링터미널 고정 방식) |
| IP 보호 등급 | IPx4 |