| Item | Requirements |
|---|---|
| Discharge Voltage Range | 39.2V ~ 58.8V |
| Maximum Discharge Current | 20A |
| Charge Voltage | 58V |
| Maximum Charge Current | 20A (Single Module) / 50A (Three Modules) |
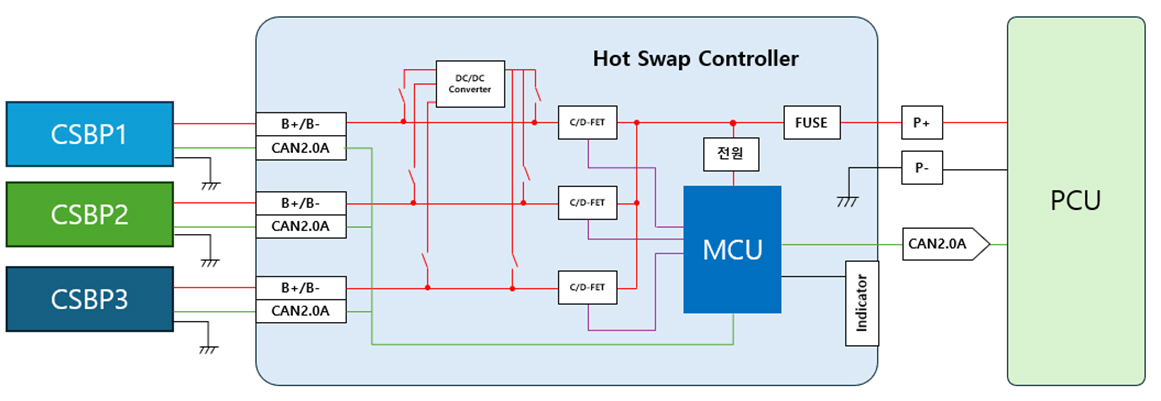
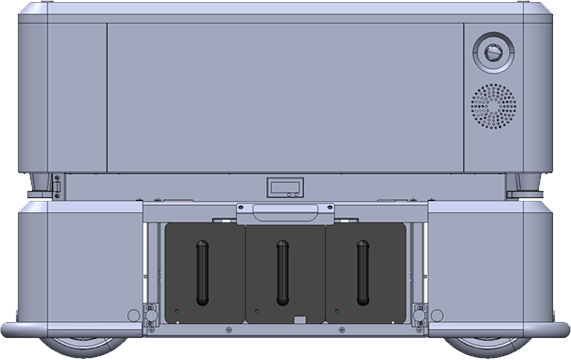
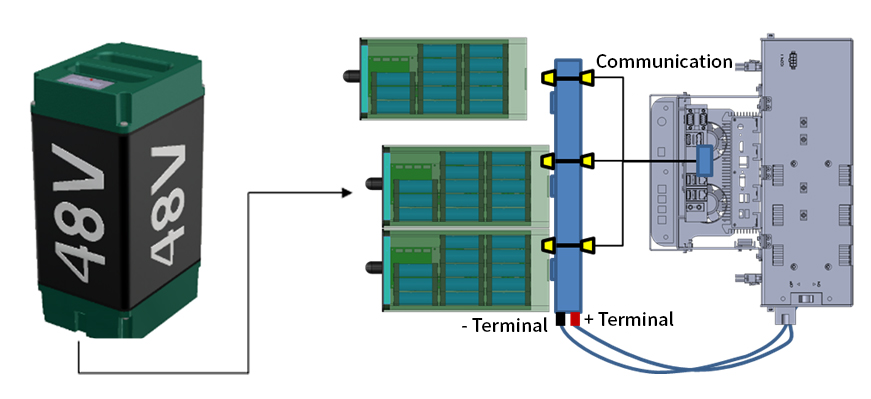
| Parallel Module Configuration | 3 Modules in Parallel |
| Output Control | MOSFET |
| Inrush Current Protection | Pre-charge Circuit or DC/DC Converter |
| Swapping Status Indicator | LED Status Indicator (Module 1–3 / Power / Fault) |
| Monitoring Software | Bluetooth Mobile Monitoring and Data Logging |
| Enclosure | Steel with Black Powder Coating (Black) |
| Compatible Size Range | Within 425 × 178 × 170 mm |
| Communication Port | U-CAN |
| Input / Output Connector | Terminal Block with Cover (Ring Terminal Fixing Type) |
| IP Protection Rating | IPx4 |